การตั้งค่า Debug Radar DS-TMG034
**วิธีการตรวจสอบหาจุดที่เรดาร์ Detect ได้
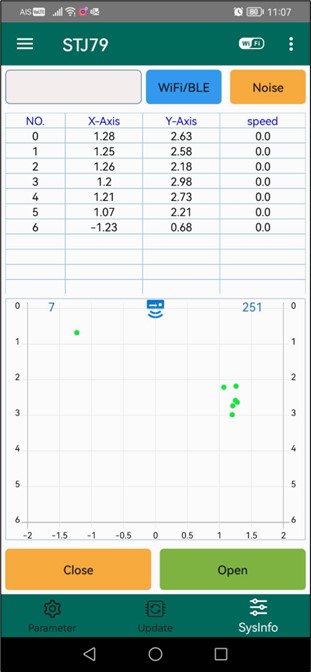
1. หลังจากที่ต่อเรดาร์เข้ากับโปรแกรม STJ79 แล้วให้ไปที่แท็ป SysInfo และกดปุ่ม Open เพื่อเริ่มทำการ Detect จะเห็นว่าจุดเขียวๆ ที่เกิดขึ้นมาที่กราฟก็คือตำแหน่งของวัตถุที่เรดาร์ตรวจจับได้ โดยจะแสดงค่า X,Y ประกอบไว้ด้วยตัวเลขที่เห็นจะมีหน่วยเป็นเมตร เช่นบรรทัดแรก X,Y 1.28,2.63 หมายถึงวัตถุอยู่ห่างไปทางซ้ายของเรดาร์ 1.28 เมตรและอยู่ไกลออกไป 2.63 เมตร
**กรณีที่มี False Alarm เกิดขึ้นบริเวณขอบใกล้ๆ เรดาร์จะต้องตั้งค่ายังไง
2. ยกตัวอย่างตามรูปด้านล่างเกิดสัญญาณค้างที่ตัวเรดาร์เนื่องจากตรวจจับอะไรบางอย่างได้ตลอดเวลา โดยจะเห็นว่าตัวเรดาร์สามารถตรวจจับขอบฐานของป้าย LED ได้ ทำให้ไม่สามารถใช้งานจริงได้ ดังนั้นให้ทำการตรวจสอบระยะที่สามารถตรวจจับวัตถุได้ตามข้อ 1 ก่อน จากนั้นจะเห็นว่าตำแหน่งที่ตรวจจับได้อยู่ไปทางขวาโดยค่าที่ใกล้ที่สุดคือ -0.57 เมตร (ค่าลบแกน X หมายถึงวัตถุอยู่ทางด้านขวาของเรดาร์) และค่าทางแกน Y ที่ไกลที่สุดคือ 0.5 เมตร ดังนั้นกรณีนี้ให้ปรับค่าการตรวจจับของเรดาร์เป็น LeftWidth/RightWidth เป็น 1.0 เมตร และ MinRange เป็น 0.6 เมตร จะทำให้เรดาร์ทำการตรวจจับวัตถุใดๆ ก็ตามในระยะซ้ายและขวาของเรดาร์ไกล 1 เมตร และจะเริ่มตรวจจับที่ระยะ 0.6 เมตรเป็นต้นไป ทำให้จะสามารถยกเว้นการตรวจจับฐานของป้ายที่ระยะ 0.5 เมตรได้

**กรณีที่มี False Alarm เกิดขึ้นบริเวณห่างจากเรดาร์ซ้ายและขวาจะต้องตั้งค่ายังไง
3. ยกตัวอย่างตามรูปด้านล่างเกิดสัญญาณค้างที่ตัวเรดาร์เนื่องจากมีทีวีและโต๊ะอยู่ทางด้ายซ้ายและขวาของเรดาร์ ดังนั้นให้ทำการตรวจสอบระยะที่สามารถตรวจจับวัตถุได้ตามข้อ 1 ก่อน จากนั้นจะเห็นว่าตำแหน่งที่ตรวจจับได้อยู่ไปทางซ้ายและขวาโดยค่าที่ใกล้ที่สุดคือ 1.07 และ -1.23 เมตรตามลำดับ โดยกรณีนี้จะไม่สนใจค่าทางแกน Y ดังนั้นกรณีนี้ให้ปรับค่าการตรวจจับของเรดาร์เป็น LeftWidth/RightWidth เป็น 0.7 และ 0.9 เมตรตามลำดับ สำหรับการตั้งค้าซ้ายและขวานี้ให้ทำการเผื่อออกไปฟากละ 0.3 เมตรเนื่องจากเรดาร์อาจคลาดเคลื่อน จากตัวอย่างนี้ค่าที่ตั้ง LeftWidth = 0.7+0.3 = 1.0 เมตรซึ่งน้อยกว่าตำแหน่งที่ตรวจจับได้ทางซ้ายที่ใกล้ที่สุด (1.07 เมตร) และ RightWidth = 0.9+0.3 = 1.2 เมตรซึ่งน้อยกว่าตำแหน่งที่ตรวจจับได้ทางซ้ายที่ใกล้ที่สุด (-1.23 เมตร)

**กรณีที่ต้องการเพิกเฉยต่อ False Alarm จะทำอย่างไร
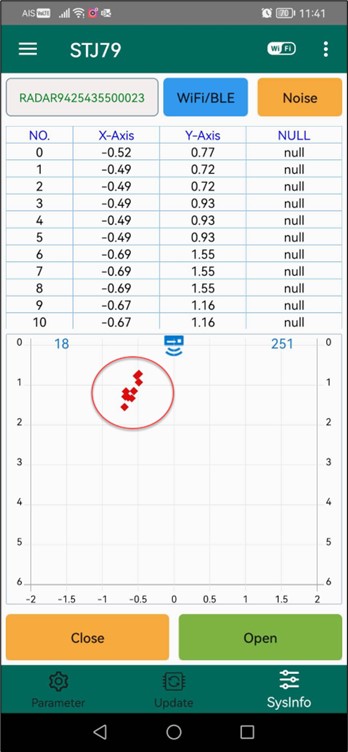
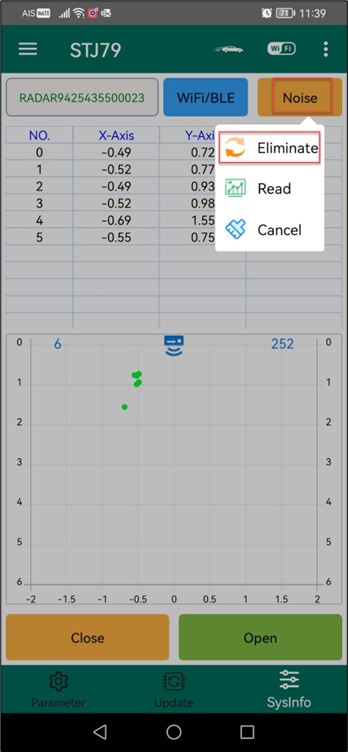
4. ถ้าเกิดกรณีที่ไม่สามารถย้ายโซนในการตรวจจับตามข้อ 2 และ 3 ได้ เช่นมีเสาของกล้องหรือป้ายดันไปอยู่หน้าเรดาร์ในระยะที่ไม่สามารถจำกัดโซนการตรวจสอบได้แล้ว หรือมีรางระบายน้ำเหล็กอยู่ตรงกลางไม้กั้นพอดี หลังจากที่ทำการตรวจจับวัตถุได้ตามรูปล่างด้ายซ้ายมือสุดแล้วให้กดปุ่ม Noise จากนั้นกด Eliminate เพื่อทำการยกเว้นวัตถุที่ตรวจจับได้ที่ตำแหน่งบริเวณนี้ (หลังจากกด Eliminate ให้กันคนหรือวัตถุอื่นออกจากหน้าเรดาร์ประมาณ 5 วินาที) จากนั้นให้ทำการตรวจจับวัตถุตามข้อ 1 อีกครั้งถ้ายังเกิด False Alarm อีกก็ให้ทำการ Eliminate อีกจนกว่าจะหมดไป โดยสามารถดูค่าที่ Eliminate ออกได้จากเมนู Noise>Read โดยจะแสดงออกมาเป็นจุดสีแดงตามภาพด้านขวา